Navigation : EXPO21XX > RENEWABLE ENERGY 21XX >
H29: Universities - Renewable Energy Research
> Technical University Munich - TUM
Technical University Munich - TUM


- Offer Profile
- Institute for Real-Time
Computer Systems
Our research and teaching activities encompass all aspects of real-time and embedded systems design. Our goal is to develop techniques and tools that would aid system designers to effectively design, debug and program real-time embedded systems.
Product Portfolio
Research

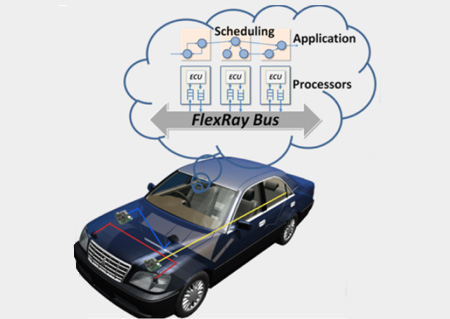
Control/Architecture Co-Design
- Today, cars are becoming complex distributed embedded
systems with a proliferation in the number of processing units (PUs),
sensors, controllers, and actuators which communicate via a shared bus,
e.g., CAN or FlexRay. Due to the distributed nature of processing resources
in such in-vehicle networks, control applications are partitioned into a
number of tasks which are mapped on the different PUs. Data which is
processed by the tasks, e.g., feedback and actuator signals, are packetized
as messages which are sent over a shared communication bus according to a
specified scheduling policy.
Further, many of the distributed controllers have stringent quality and performance requirements, such as stability and peak overshoot, while the implementation platform demands requirements on the available resources, e.g., bus identifiers and processing capacity. As the control performance depends on certain choices of network parameter values and message priorities, and in turn the choices of scheduler parameters is constraint by the real-time requirements of the control applications, the joint design of control functions along with their distributed implementation platform is a challenging design problem. Hence, we want to account for the semantic gap between the controller models and their actual implementations.
Towards this, our goal is to develop techniques for the joint design of controllers and their implementation architectures, e.g., schedule synthesis and network design for the FlexRay communication protocol, to aid system designers to effectively design control applications with respect to the distributed hardware/software platform under desired control performance constraints.

Sensor Nodes And Energy Aware Signal Analysis
- One of the main challenges in the body-area sensor network domain is to suitably break complex signal processing tasks into manageable parts in order to reduce their algorithmic complexity while retaining their output quality. Our goal is to map some of these tasks onto sensor nodes and the others onto computation platforms or gateways like mobile phones. We attempt to address this problem in the specific context of physical activity monitoring. To start with, physical activity recognition tasks are carried out on the mobile phone and results are fed back to the sensor nodes for better signal preprocessing. Cooperative signal processing significantly improves the battery life of the mobile phone as well as that of the sensor node.

PiNav - Pedestrian Indoor Navigation
- As the importance of location-based services grows, the
accuracy and availability of location becomes a crucial issue for the
success of such services. While outdoor localization via GPS is widely used,
indoor localization without the aid of costly infrastructure still remains
an area of active research.
The practicality of indoor localization is often hindered by the need for expensive and cumbersome sensor systems and the absence of accurate indoor maps. To overcome these inconveniences we have developed a mobile localization system, based on small wearable wireless sensors. These send their data to an off-the shelf handheld device, which serves as sensor fusion system. For visualization and map matching we use a topological indoor map, that is automatically extracted from standard CAD sources. Thus we enable the user to determine his current position at any time and at any place.

Power Management for Interactive Applications
- Graphics-intensive game applications gained significant
popularity in recent years. Although most of them are available on high-end
desktops, the advent of these applications on battery-powered mobile devices
(e.g., laptops, PDAs, cell phones and portable game consoles) is steadily
increasing. This recent development is resulting in a constantly widening
gap between the demand for computational resources on portable devices and
the corresponding energy resources available through batteries. In this
context, power management techniques play a significant role in reducing
this gap and in increasing the energy efficiency of these devices.
Most of these devices are equipped with dynamic voltage/frequency-scalable
processors in which the power dissipated per clock cycle is directly
proportional to its frequency and the square of the supply voltage.
Therefore, one can reduce energy consumption through dynamic voltage
frequency scaling (DVFS) techniques, where the processor's clock frequency
is dynamically adjusted based on the predicted workload of the next frame.
The quality of the prediction highly influences the resulting performance of
the system: a frequency chosen too high will waste energy whereas a
frequency chosen too low will result in a frame rate drop reducing the
game’s quality significantly.
We are currently investigating methods to improve the prediction accuracy and thereby reduce the energy consumption and satisfy the user's perception.
Embedded Systems Design for Electric Vehicles
- Next generation electric vehicles will radically change
the design paradigms in the automotive domain. There is a broad agreement
that these electric vehicles require an entire redesign of the
electrical/electronic infrastructure. Although a significant fraction of
innovation in modern cars is already driven by electronics, there is still a
number of research challenges that need to be addressed before
fully-functional, completely electric vehicles become a practical reality.
The project shall investigate techniques to design energy-efficient and low-priced ECU (electronic control unit) architectures for electric vehicles. This comprises the design of ECUs as well as the layout of the in-vehicle communication network. The goal of the project is to provide a sustainable ECU architecture as well as a design methodology that supports and improves the development process.

VM-Based Scheduling for Embedded Systems
- Traditionally, different functionalities or applications
in the automotive domain are implemented on different electronic control
units (ECUs). This has led to a large number of ECUs in modern cars, which
increases cost and leads to wiring complications. As a result, lately there
is an increasing focus on integrating multiple applications on a single ECU,
along with a VM layer to provide isolation between them.
The work we conduct follows this direction with the aim of supporting a mix of hard-real-time control applications with non- or soft-real-time (e.g., multimedia) applications on a commodity VM. In particular, we use the Xen hypervisor, an available open-source VM monitor, and analyze its behavior in the context of real-time applications. We are further concerned with the design of VM schedulers, i.e., how to configure time slices and periods for every VM in the system such that all real-time tasks running on them can meet their deadlines.

Objective methods in audiological diagnostics
- «The inability to see separates from things, the
inability to hear separates from humans.» Immanuel Kant
Hearing disorders are usually diagnosed with subjective testing. This requires a conscious, active participation of the patient. In the case of a newborn or toddler, such tests are not feasible. Similarly, subjective tests are sometimes difficult to conduct in elderly people.
However, there are objective tests that allow assessing the status of hearing, without having to rely on the active cooperation of the investigated person.
To allow the most complete, fast and automated diagnosis of hearing with objective methods, the project has several goals:- Integration of all objective and subjective testing of audiometry on a common
- measurement platform
- Combination of measurement methods that complement each other
- Improvements in terms of time requirements and degree of automation
- Miniaturization of the hardware used (goal: mobile system, handheld device)
- Development and evaluation of new methods

Admission Control for Multiprocessor Platforms
- In many real-time systems such as modern games,
multimedia/communication servers, etc., tasks have to be accepted or
rejected on-line based on whether it is possible to schedule them or not.
The algorithm responsible for testing the schedulability of a new task in a
system is normally referred to as admission control test and requires a fast
and predictable running time.
The computational complexity of an admission control test depends not only on the used task model, but also on the system architecture. As an admission control algorithm for multiprocessors has to deal with allocating tasks to processors, which is known to be NP-hard in the strong sense, we need to use approximation techniques.
Goal of this project is to develop approximation techniques that allow for sophisticated task models and, at the same time, a low complexity. In particular, we are interested in constant complexity since the running time of the resulting algorithm will not depend on the number of tasks already accepted in the system.

KogniMobil: Cognitive Automobiles
- Cognitive automobiles will be capable to perceive their
environment and to interpret the behaviour of other traffic participants, to
automatically generate suitable behaviour and to cooperate with others in
their perception process and decision making. Analytic research is
accompanied by closed-loop simulations and experimental autonomous vehicles.
At RCS, we concentrate our research ambitions on the following aspects:- Architectures for Cognitive Automobiles
- Real-time database for Cognitive Automobiles (KogMo-RTDB)
- HW/SW-Interfaces for Cognitive Systems
- Test- and simulation tools for Cognitive Systems
- Detection and tracking of traffic-related objects
- Bio-inspired systems for machine vision
- Omnidirectional camera systems

Bluetooth Interferences in Body Area Sensor Network
- Bluetooth is well known
digital wireless communications system intended to replace the cables
connecting mobile or fixed electronic devices over short distances (up to
ten meters). Bluetooth is commonly integrated into cellphones (for bluetooth
hands-free headset for example) or in laptop (bluetooth mouse&keyboard,...).
All the bluetooth devices emit data in the 2.45 GHz ISM band. As a result,
mutual interference is a potential problem for bluetooth applications.
The development of this technology has been really fast during the past years and now bluetooth devices are spread everywhere in cities. According to the density of the population and the power of the bluetooth emitter, it is possible to have scenarios where the number of interferences becomes some high that nodes can no communicate together anymore. But evaluate those scenarios is not trivial, because the probability of interferences depends on multiple parameters.
At the RCS, we work on mathematical frameworks and simulation tools to analyze the risk of interferences in Body Sensor systems (using bluetooth protocol) and try to find solution to improve the communication efficiency.