University of Oslo

Videos
Loading the player ...
- Offer Profile
- Robots
- Develop our own robot
- Self-learning
Reconfigurable logic (FPGA)
- Run-time reconfigurable hardware
- Autonomous reconfiguration
Bio-inspired systems (self-learning)
- Evolutionary Algorithm
- Artificial Neural Networks
Applications (embedded systems)
- Analyzing signals from sensors/camera
- Robot control
Product Portfolio
Robots learning to walk by the use of genetic algorithms
- Algorithms for machine learning
Incremental evolution: In most practical applications the search space for a genetic algorithm is very large. For realtime hardware evolution time is therefore a mayor limitation in the search for advanced solutions. We are exploring incremental techniques to reduce the size of the search space in an optimal way. We are using different hardware walking machines to verify our results.
"Mono"
- Mono is a one-legged pneumatic foot. 2 pneumatic
cylinders. Electrically (binary) controlled by PC. Learns to jump fast
forward by evolution in less than 3min. Feedback: angle sensor.
Mono has demonstrated realtime evolution in a stage show seen by 4600 students at the NFR "ungforsk" science fair, Blindern, Oslo, Oct. 2004. Mono has also performed outdoor at NFR "forskningstorget" science fair 2004.



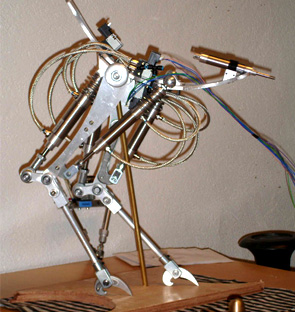
"Henriette"
- Henriette is a 2-legged pneumatic "chicken". 4
pneumatic cylinders. Electrically (binary) controlled by PC. Learns to walk
relativerly fast forward by evolution in less than 4min. Feedback: angle
sensor. Detailed specifications (pdf).
Henriette together with Mono have performed and demonstrated realtime evolution on national TV seen by 600-700.000 people (NRK Schrødingers Katt, Jan. 2005). Henriette has also performed at "Åpen Dag" 2005, TV2 "klistrehjerne" 2005 and at NFR "forskningstorget" science fair 2005.



"Erna"
- Erna is a 2-legged pneumatic "raptor" (strong, agressive). 4 pneumatic cylinders. Electrically (binary) controlled by PC. Feedback: angle sensor.


"Turbo"
- Turbo is a 4-legged pneumatic "dog". 8 pneumatic cylinders. Electrically (binary) controlled by PC.



The bionic arm project
- Bionic arm: How close to biology can we make an arm
prosthesis? Will a future arm prosthesis be a complete replacement of the
original biologic arm? We believe that a future arm prosthesis will be
directly controlled by the nerves is the remaining limb. We also believe
that the user will "feel" the arm in a way that resembles the feeling from
the original biological arm. This can be made possible by the use of sieve
microelectrodes which are operated in to the nerve of the remaining limb.
The sieve electrode can both receive signals from the nervous system, and at
the same time send artificial generated sensory signals back to the nervous
system.
Activity A: We are investigating the possibility of using artificial muscle fibers to actuate the 5 fingers and the wrist of the prosthesis.
The output control signal from the sieve electrode will consist of hundreds of channels with information from the nervous system. These signals must be sorted and adapted to control the artificial muscle fibers.
Activity B: We are currently testing artificial neural networks used for signal sorting and muscle control (simulated control signals).
Arm prosthesis
- Aluminium arm prosthesis. Artificial muscle fibre (Flexinol) will be directly controlled by upper arm nerve signals restored by an artificial neural network.


Muscle fibre
- Artificial muscle fiber (Flexinol)
dBot
mBot
The "ANNA" project
- Our 7-axis Motoman IA20 industrial robot "Anna" with an AI interface including a vision system, audio sensors, touch sensors, audio output and LED mode-signaling. Controlled by mini-Mac / java / SOAP.

Anna

Pneumatic actuated humanoid arm

Artificial spine






